Quaternion< T > Class Template Reference
#include <Rotation.h>
Public Member Functions | |
| Quaternion (void) | |
| Quaternion (T S, T X, T Y, T Z, T N=(T) 0.0, T C=(T) 1.0) | |
| Quaternion (T S, Vector< T > v) | |
| virtual | ~Quaternion (void) |
| T | norm (void) |
| void | normalize (void) |
| void | set (T S, T X, T Y, T Z, T N=(T) 0.0, T C=(T) 1.0) |
| void | init (T C=(T) 1.0) |
| Vector< T > | getVector () |
| T | getScalar () |
| T | getAngle () |
| 0〜2π | |
| T | getMathAngle () |
| -π〜π | |
| Matrix< T > | getRotMatrix () |
| void | setRotation (T e, Vector< T > v) |
| void | setRotation (T e, T X, T Y, T Z, T N=(T) 0.0) |
| void | setRotate (T e, Vector< T > v) |
| void | setRotate (T e, T X, T Y, T Z, T N=(T) 0.0) |
| void | setExtEulerXYZ (Vector< T > e) |
| X->Y->Z. | |
| void | setExtEulerZYX (Vector< T > e) |
| Z->Y->X. | |
| void | setExtEulerXZY (Vector< T > e) |
| X->Z->Y. | |
| void | setExtEulerYZX (Vector< T > e) |
| Y->Z->X. | |
| void | setExtEulerYXZ (Vector< T > e) |
| Y->X->Z. | |
| void | setExtEulerZXY (Vector< T > e) |
| Z->X->Y. | |
| Vector< T > | getExtEulerXYZ (Vector< T > *vt=NULL) |
| Vector< T > | getExtEulerZYX (Vector< T > *vt=NULL) |
| Vector< T > | getExtEulerXZY (Vector< T > *vt=NULL) |
| Vector< T > | getExtEulerYZX (Vector< T > *vt=NULL) |
| Vector< T > | getExtEulerYXZ (Vector< T > *vt=NULL) |
| Vector< T > | getExtEulerZXY (Vector< T > *vt=NULL) |
| Vector< T > | execRotation (Vector< T > v) |
| Exec Rotation qv(~q). | |
| Vector< T > | execInvRotation (Vector< T > v) |
| Exec Inv Rotation (~q)vq. | |
| Vector< T > | execRotate (Vector< T > v) |
| Vector< T > | execInvRotate (Vector< T > v) |
Public Attributes | |
| T | s |
| T | x |
| T | y |
| T | z |
| T | n |
| ノルム | |
| T | c |
| 信頼度 | |
Detailed Description
template<typename T = double>
class jbxl::Quaternion< T >
class DllExport Quaternion
クォータニオンの定義
回転の合成:A*B => Bの回転 -> Aの回転
Definition at line 45 of file Rotation.h.
Constructor & Destructor Documentation
| Quaternion | ( | void | ) | [inline] |
Definition at line 57 of file Rotation.h.
00057 { init();}
| Quaternion | ( | T | S, | |
| T | X, | |||
| T | Y, | |||
| T | Z, | |||
| T | N = (T)0.0, |
|||
| T | C = (T)1.0 | |||
| ) | [inline] |
Definition at line 58 of file Rotation.h.
| Quaternion | ( | T | S, | |
| Vector< T > | v | |||
| ) | [inline] |
Definition at line 59 of file Rotation.h.
00059 { setRotation(S, v);}
| virtual ~Quaternion | ( | void | ) | [inline, virtual] |
Definition at line 60 of file Rotation.h.
Member Function Documentation
Definition at line 99 of file Rotation.h.
00099 { return execInvRotation(v);}
Definition at line 634 of file Rotation.h.
References Quaternion< T >::c, Vector< T >::d, and Quaternion< T >::getVector().
00635 { 00636 if (c<(T)0.0) return v; 00637 00638 Quaternion<T> inv = ~(*this); 00639 Quaternion<T> qut = inv*(v*(*this)); 00640 Vector<T> vct = qut.getVector(); 00641 vct.d = v.d; 00642 00643 return vct; 00644 }

Definition at line 98 of file Rotation.h.
00098 { return execRotation(v);}
Definition at line 619 of file Rotation.h.
References Quaternion< T >::c, Vector< T >::d, and Quaternion< T >::getVector().
Referenced by FacetTriData::execRotate().
00620 { 00621 if (c<(T)0.0) return v; 00622 00623 Quaternion<T> inv = ~(*this); 00624 Quaternion<T> qut = (*this)*(v*inv); 00625 Vector<T> vct = qut.getVector(); 00626 vct.d = v.d; 00627 00628 return vct; 00629 }


| T getAngle | ( | ) | [inline] |
Definition at line 70 of file Rotation.h.
Definition at line 89 of file Rotation.h.
Definition at line 91 of file Rotation.h.
Definition at line 93 of file Rotation.h.
Definition at line 92 of file Rotation.h.
Definition at line 94 of file Rotation.h.
Definition at line 90 of file Rotation.h.
| T getMathAngle | ( | ) | [inline] |
Definition at line 71 of file Rotation.h.
Referenced by jbxl::SlerpQuaternion().

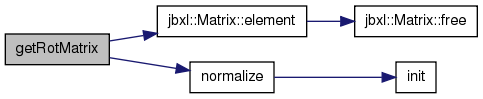
| Matrix< T > getRotMatrix | ( | ) | [inline] |
ベクトルを回転させる場合の回転行列を求める. 座標軸の回転の場合は共役クォータニオンで計算する.
Definition at line 597 of file Rotation.h.
References Matrix< T >::element(), Quaternion< T >::n, Quaternion< T >::normalize(), Quaternion< T >::s, Quaternion< T >::x, Quaternion< T >::y, and Quaternion< T >::z.
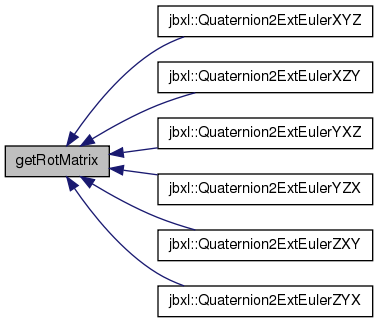
Referenced by jbxl::Quaternion2ExtEulerXYZ(), jbxl::Quaternion2ExtEulerXZY(), jbxl::Quaternion2ExtEulerYXZ(), jbxl::Quaternion2ExtEulerYZX(), jbxl::Quaternion2ExtEulerZXY(), and jbxl::Quaternion2ExtEulerZYX().
00598 { 00599 Matrix<T> mtx(2, 3, 3); // 2次元マトリックス, 3x3 00600 00601 if (n!=(T)1.0) normalize(); 00602 00603 mtx.element(1, 1) = (T)1.0 - (T)2.0*y*y - (T)2.0*z*z; 00604 mtx.element(1, 2) = (T)2.0*x*y - (T)2.0*s*z; 00605 mtx.element(1, 3) = (T)2.0*x*z + (T)2.0*s*y; 00606 mtx.element(2, 1) = (T)2.0*x*y + (T)2.0*s*z; 00607 mtx.element(2, 2) = (T)1.0 - (T)2.0*x*x - (T)2.0*z*z; 00608 mtx.element(2, 3) = (T)2.0*y*z - (T)2.0*s*x; 00609 mtx.element(3, 1) = (T)2.0*x*z - (T)2.0*s*y; 00610 mtx.element(3, 2) = (T)2.0*y*z + (T)2.0*s*x; 00611 mtx.element(3, 3) = (T)1.0 - (T)2.0*x*x - (T)2.0*y*y; 00612 00613 return mtx; 00614 }
| T getScalar | ( | ) | [inline] |
Definition at line 69 of file Rotation.h.
00069 { return s;}
| Vector<T> getVector | ( | ) | [inline] |
Definition at line 68 of file Rotation.h.
Referenced by Quaternion< T >::execInvRotation(), Quaternion< T >::execRotation(), and jbxl::SlerpQuaternion().
| void init | ( | T | C = (T)1.0 |
) | [inline] |
Definition at line 66 of file Rotation.h.
Referenced by Quaternion< T >::normalize(), and jbxl::operator*().
| T norm | ( | void | ) | [inline] |
| void normalize | ( | void | ) | [inline] |
Definition at line 432 of file Rotation.h.
References Quaternion< T >::init(), Quaternion< T >::n, Quaternion< T >::s, Quaternion< T >::x, Quaternion< T >::y, Quaternion< T >::z, and jbxl::Zero_Eps.
Referenced by Quaternion< T >::getRotMatrix(), and jbxl::SlerpQuaternion().
00433 { 00434 T nrm = (T)sqrt(s*s + x*x + y*y + z*z); 00435 00436 if (nrm>=Zero_Eps) { 00437 s = s/nrm; 00438 x = x/nrm; 00439 y = y/nrm; 00440 z = z/nrm; 00441 n = (T)1.0; 00442 } 00443 else { 00444 init(); 00445 } 00446 }
| void set | ( | T | S, | |
| T | X, | |||
| T | Y, | |||
| T | Z, | |||
| T | N = (T)0.0, |
|||
| T | C = (T)1.0 | |||
| ) | [inline] |
Definition at line 416 of file Rotation.h.
References Quaternion< T >::c, Quaternion< T >::n, Quaternion< T >::s, Quaternion< T >::x, Quaternion< T >::y, and Quaternion< T >::z.
Referenced by CBVHTool::getQuaternion(), jbxl::operator*(), and jbxl::V2VQuaternion().
00417 { 00418 s = S; 00419 x = X; 00420 y = Y; 00421 z = Z; 00422 n = N; 00423 c = C; 00424 00425 if (n<=0.0) { 00426 n = (T)sqrt(s*s + x*x + y*y + z*z); 00427 } 00428 }
| void setExtEulerXYZ | ( | Vector< T > | e | ) | [inline] |
Definition at line 503 of file Rotation.h.
References Vector< T >::element1(), Vector< T >::element2(), Vector< T >::element3(), Quaternion< T >::s, and Quaternion< T >::setRotation().
Referenced by jbxl::ExtEulerXYZ2Quaternion(), and jbxl::RotMatrix2Quaternion().
00504 { 00505 Vector<T> ex((T)1.0, (T)0.0, (T)0.0, (T)1.0); 00506 Vector<T> ey((T)0.0, (T)1.0, (T)0.0, (T)1.0); 00507 Vector<T> ez((T)0.0, (T)0.0, (T)1.0, (T)1.0); 00508 00509 Quaternion<T> qx, qy, qz; 00510 qx.setRotation(e.element1(), ex); 00511 qy.setRotation(e.element2(), ey); 00512 qz.setRotation(e.element3(), ez); 00513 00514 (*this) = qz*qy*qx; 00515 if (s<(T)0.0) (*this) = - (*this); 00516 }
| void setExtEulerXZY | ( | Vector< T > | e | ) | [inline] |
Definition at line 539 of file Rotation.h.
References Vector< T >::element1(), Vector< T >::element2(), Vector< T >::element3(), Quaternion< T >::s, and Quaternion< T >::setRotation().
Referenced by jbxl::ExtEulerXZY2Quaternion().
00540 { 00541 Vector<T> ex((T)1.0, (T)0.0, (T)0.0, (T)1.0); 00542 Vector<T> ey((T)0.0, (T)1.0, (T)0.0, (T)1.0); 00543 Vector<T> ez((T)0.0, (T)0.0, (T)1.0, (T)1.0); 00544 00545 Quaternion<T> qx, qy, qz; 00546 qx.setRotation(e.element1(), ex); 00547 qz.setRotation(e.element2(), ez); 00548 qy.setRotation(e.element3(), ey); 00549 00550 (*this) = qy*qz*qx; 00551 if (s<(T)0.0) (*this) = - (*this); 00552 }

| void setExtEulerYXZ | ( | Vector< T > | e | ) | [inline] |
Definition at line 557 of file Rotation.h.
References Vector< T >::element1(), Vector< T >::element2(), Vector< T >::element3(), Quaternion< T >::s, and Quaternion< T >::setRotation().
Referenced by jbxl::ExtEulerYXZ2Quaternion().
00558 { 00559 Vector<T> ex((T)1.0, (T)0.0, (T)0.0, (T)1.0); 00560 Vector<T> ey((T)0.0, (T)1.0, (T)0.0, (T)1.0); 00561 Vector<T> ez((T)0.0, (T)0.0, (T)1.0, (T)1.0); 00562 00563 Quaternion<T> qx, qy, qz; 00564 qy.setRotation(e.element1(), ey); 00565 qx.setRotation(e.element2(), ex); 00566 qz.setRotation(e.element3(), ez); 00567 00568 (*this) = qz*qx*qy; 00569 if (s<(T)0.0) (*this) = - (*this); 00570 }

| void setExtEulerYZX | ( | Vector< T > | e | ) | [inline] |
template <typename t>=""> void Quaternion<T>::setExtEulerYZX(Vector<T> e)
Y->Z->X の順にオイラー角でベクトルを回転させる場合のクオータニオンを計算する.
- Parameters:
-
e オイラー角の成分.作用させる順番に格納する. この場合, e.xはY軸回転,e.yはZ軸回転,e.z はX軸回転のそれぞれの回転角(ラジアン)を格納する.
Definition at line 485 of file Rotation.h.
References Vector< T >::element1(), Vector< T >::element2(), Vector< T >::element3(), Quaternion< T >::s, and Quaternion< T >::setRotation().
Referenced by jbxl::ExtEulerYZX2Quaternion().
00486 { 00487 Vector<T> ex((T)1.0, (T)0.0, (T)0.0, (T)1.0); 00488 Vector<T> ey((T)0.0, (T)1.0, (T)0.0, (T)1.0); 00489 Vector<T> ez((T)0.0, (T)0.0, (T)1.0, (T)1.0); 00490 00491 Quaternion<T> qx, qy, qz; 00492 qy.setRotation(e.element1(), ey); 00493 qz.setRotation(e.element2(), ez); 00494 qx.setRotation(e.element3(), ex); 00495 00496 (*this) = qx*qz*qy; 00497 if (s<(T)0.0) (*this) = - (*this); 00498 }

| void setExtEulerZXY | ( | Vector< T > | e | ) | [inline] |
Definition at line 575 of file Rotation.h.
References Vector< T >::element1(), Vector< T >::element2(), Vector< T >::element3(), Quaternion< T >::s, and Quaternion< T >::setRotation().
Referenced by jbxl::ExtEulerZXY2Quaternion().
00576 { 00577 Vector<T> ex((T)1.0, (T)0.0, (T)0.0, (T)1.0); 00578 Vector<T> ey((T)0.0, (T)1.0, (T)0.0, (T)1.0); 00579 Vector<T> ez((T)0.0, (T)0.0, (T)1.0, (T)1.0); 00580 00581 Quaternion<T> qx, qy, qz; 00582 qz.setRotation(e.element1(), ez); 00583 qx.setRotation(e.element2(), ex); 00584 qy.setRotation(e.element3(), ey); 00585 00586 (*this) = qy*qx*qz; 00587 if (s<(T)0.0) (*this) = - (*this); 00588 }

| void setExtEulerZYX | ( | Vector< T > | e | ) | [inline] |
Definition at line 521 of file Rotation.h.
References Vector< T >::element1(), Vector< T >::element2(), Vector< T >::element3(), Quaternion< T >::s, and Quaternion< T >::setRotation().
Referenced by jbxl::ExtEulerZYX2Quaternion().
00522 { 00523 Vector<T> ex((T)1.0, (T)0.0, (T)0.0, (T)1.0); 00524 Vector<T> ey((T)0.0, (T)1.0, (T)0.0, (T)1.0); 00525 Vector<T> ez((T)0.0, (T)0.0, (T)1.0, (T)1.0); 00526 00527 Quaternion<T> qx, qy, qz; 00528 qz.setRotation(e.element1(), ez); 00529 qy.setRotation(e.element2(), ey); 00530 qx.setRotation(e.element3(), ex); 00531 00532 (*this) = qx*qy*qz; 00533 if (s<(T)0.0) (*this) = - (*this); 00534 }

| void setRotate | ( | T | e, | |
| T | X, | |||
| T | Y, | |||
| T | Z, | |||
| T | N = (T)0.0 | |||
| ) | [inline] |
Definition at line 79 of file Rotation.h.
00079 { Vector<T> v(X, Y, Z, N); setRotation(e, v);}
| void setRotate | ( | T | e, | |
| Vector< T > | v | |||
| ) | [inline] |
Definition at line 78 of file Rotation.h.
00078 { setRotation(e, v);}
| void setRotation | ( | T | e, | |
| T | X, | |||
| T | Y, | |||
| T | Z, | |||
| T | N = (T)0.0 | |||
| ) | [inline] |
Definition at line 76 of file Rotation.h.
Referenced by Quaternion< double >::setRotation().
00076 { Vector<T> v(X, Y, Z, N); setRotation(e, v);}
| void setRotation | ( | T | e, | |
| Vector< T > | v | |||
| ) | [inline] |
回転を定義する
- Parameters:
-
e 回転角.ラジアン単位. v 回転軸
Definition at line 456 of file Rotation.h.
References Quaternion< T >::c, Quaternion< T >::n, Vector< T >::n, Vector< T >::normalize(), PI, PI2, Quaternion< T >::s, Vector< T >::x, Quaternion< T >::x, Vector< T >::y, Quaternion< T >::y, Vector< T >::z, and Quaternion< T >::z.
Referenced by CBVHTool::getQuaternion(), Quaternion< T >::setExtEulerXYZ(), Quaternion< T >::setExtEulerXZY(), Quaternion< T >::setExtEulerYXZ(), Quaternion< T >::setExtEulerYZX(), Quaternion< T >::setExtEulerZXY(), Quaternion< T >::setExtEulerZYX(), jbxl::SlerpQuaternion(), and jbxl::V2VQuaternion().
00457 { 00458 if (v.n!=(T)1.0) v.normalize(); 00459 00460 if (e>(T)PI) e = e - (T)PI2; 00461 else if (e<-(T)PI) e = (T)PI2 + e; 00462 00463 T s2 = e/(T)2.0; 00464 T sn =(T) sin(s2); 00465 s = (T)cos(s2); 00466 x = v.x*sn; 00467 y = v.y*sn; 00468 z = v.z*sn; 00469 n = (T)v.n; 00470 c = (T)1.0; 00471 }

Member Data Documentation
| T c |
Definition at line 54 of file Rotation.h.
Referenced by Quaternion< T >::execInvRotation(), Quaternion< T >::execRotation(), jbxl::operator*(), jbxl::operator+(), jbxl::operator-(), jbxl::operator/(), jbxl::operator~(), Quaternion< T >::set(), Quaternion< T >::setRotation(), and jbxl::V2VQuaternion().
| T n |
Definition at line 53 of file Rotation.h.
Referenced by Quaternion< T >::getRotMatrix(), Quaternion< T >::normalize(), jbxl::operator*(), jbxl::operator-(), jbxl::operator/(), jbxl::operator~(), Quaternion< T >::set(), Quaternion< T >::setRotation(), jbxl::SlerpQuaternion(), and jbxl::V2VQuaternion().
| T s |
Definition at line 48 of file Rotation.h.
Referenced by Quaternion< T >::getRotMatrix(), Quaternion< T >::normalize(), jbxl::operator!=(), jbxl::operator*(), jbxl::operator+(), jbxl::operator-(), jbxl::operator/(), jbxl::operator==(), jbxl::operator~(), Quaternion< T >::set(), Quaternion< T >::setExtEulerXYZ(), Quaternion< T >::setExtEulerXZY(), Quaternion< T >::setExtEulerYXZ(), Quaternion< T >::setExtEulerYZX(), Quaternion< T >::setExtEulerZXY(), Quaternion< T >::setExtEulerZYX(), Quaternion< T >::setRotation(), jbxl::SlerpQuaternion(), jbxl::V2VQuaternion(), jbxl::VectorInvRotation(), and jbxl::VectorRotation().
| T x |
Definition at line 49 of file Rotation.h.
Referenced by Quaternion< T >::getRotMatrix(), Quaternion< T >::normalize(), jbxl::operator!=(), jbxl::operator*(), jbxl::operator+(), jbxl::operator-(), jbxl::operator/(), jbxl::operator==(), jbxl::operator~(), Quaternion< T >::set(), Quaternion< T >::setRotation(), jbxl::SlerpQuaternion(), jbxl::VectorInvRotation(), and jbxl::VectorRotation().
| T y |
Definition at line 50 of file Rotation.h.
Referenced by Quaternion< T >::getRotMatrix(), Quaternion< T >::normalize(), jbxl::operator!=(), jbxl::operator*(), jbxl::operator+(), jbxl::operator-(), jbxl::operator/(), jbxl::operator==(), jbxl::operator~(), Quaternion< T >::set(), Quaternion< T >::setRotation(), jbxl::SlerpQuaternion(), jbxl::VectorInvRotation(), and jbxl::VectorRotation().
| T z |
Definition at line 51 of file Rotation.h.
Referenced by Quaternion< T >::getRotMatrix(), Quaternion< T >::normalize(), jbxl::operator!=(), jbxl::operator*(), jbxl::operator+(), jbxl::operator-(), jbxl::operator/(), jbxl::operator==(), jbxl::operator~(), Quaternion< T >::set(), Quaternion< T >::setRotation(), jbxl::SlerpQuaternion(), jbxl::VectorInvRotation(), and jbxl::VectorRotation().
The documentation for this class was generated from the following file:
- MathLib/Rotation.h